Permalink
Cannot retrieve contributors at this time
Name already in use
A tag already exists with the provided branch name. Many Git commands accept both tag and branch names, so creating this branch may cause unexpected behavior. Are you sure you want to create this branch?
OBSTACLE_AVOIDING_ROBOT_Ahmed_Alhammali/README.md
Go to fileThis commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
19 lines (8 sloc)
1009 Bytes
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| # OBSTACLE_AVOIDING_ROBOT | |
| This study deals with the design and development of a machine (robot) to detect and avoid obstacle during motion. The objective is to use appropriate hardware and software to develop a robot for consistent motion, identification of obstacles and detection of safe route to maneuver during the motion. The preferred hardware for this system is Arduino Micro-controller and the software component is a program in C compiler. | |
| # Hardware | |
| The hardware component required for the system to operate is the Arduino UNO microcontroller and the L298N Motor Driver. The schematic diagram of the Arduino UNO is shown below. | |
| 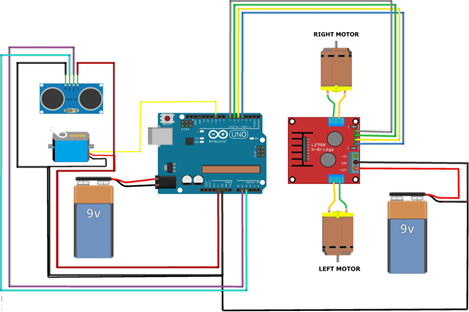 | |
| # Analysis | |
| From analysis of the functional and non-functional requirements, the following use case diagram demonstrates the core functionality of the robot. | |
| 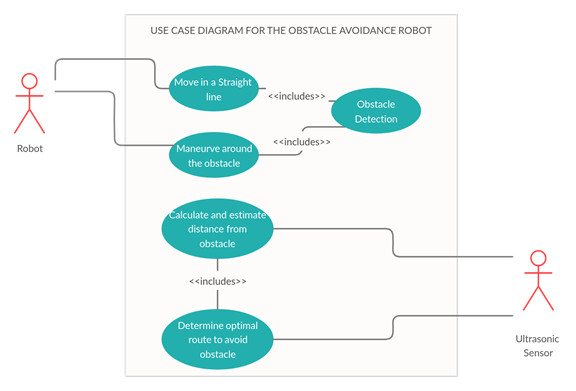 |