Scheduling
Dan Goldsmith
Scheduling
Introduction
- Things are starting to get interesting now
- We have been developing systems that do multiple things at once
- Looked at strategies for dealing with Input driven tasks
- Time for some Theory
Thread States
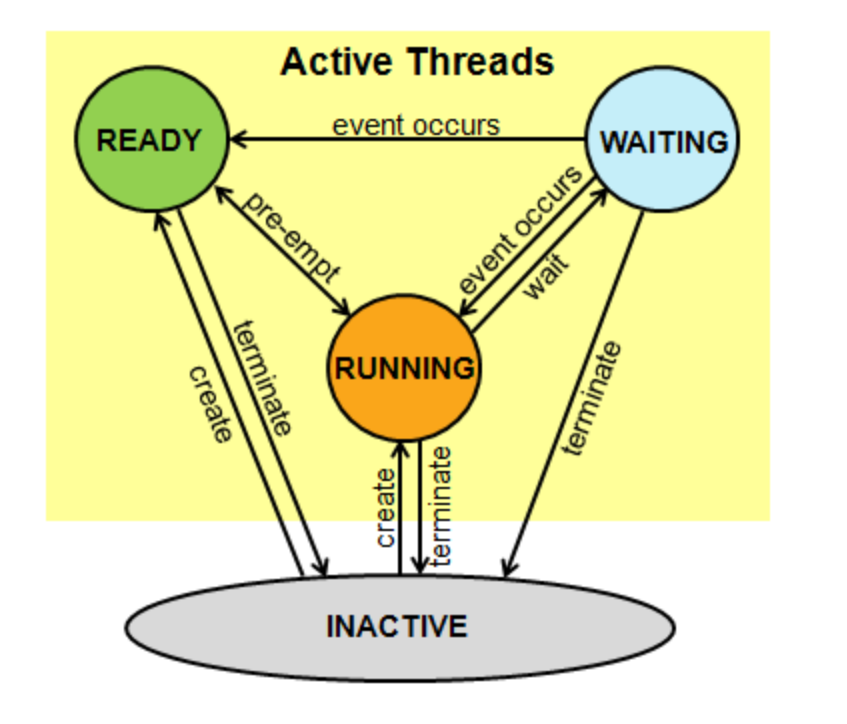
Thread States
- Running: Currently running thread
- Ready: Threads that are ready to run
- Waiting: Threads waiting for an event to occur
- Inactive: Threads that are not created
So How do we switch between Threads
- Only one task can one at a time
- We need some mechanism to switch between tasks
- This is the responsibility of the Scheduler
The Scheduler
The Scheduler
- Part of the Kernel responsible for determining which task runs next
- At each Tick the scheduler evaluates:
- What tasks are Ready to be Run
- Which task should run next
Scheduling Criteria
- Utilisation (ie CPU / IO Usage)
- Throughput (completing more processes in a given time)
- Turnaround (Time taken to complete processes)
- Response (Delay in user interaction)
- Deadline (Hard or Soft Realtime)
- Priority (Some Processes are more important than others)
- Predictability (less variation in performance)
Scheduler Concepts
- Wait Time: Time between a process being made ready to run and it starting
- Run Time: Length of time a job runs for
- Turnaround Time: Time between a process being make ready and it completing
Properties of the Task
- We also have to deal with different types of task
- IO Bound: Deal mainly with User Input
- CPU Bound: Deal mainly with processing.
- We may also have Tasks that depend on each other.
Non Preemptive Scheduling (Cooperative Multitasking)
- Processes co-operate to make best use of the CPU
- Each task will keep running till it decides to give up or blocks
- New Higher Priority tasks will only get access when the CPU is free
- Events are handled by interrupts
Non Preemptive Scheduling
- Advantages:
- Reduces Interrupt latency
- Can make it easier to use shared resources
- Disadvantages:
- responsiveness is low
- non deterministic
First Come First Served
- First Come First Served (or FIFO)
- Processes are added to the queue in order
- When a process completes, the next one is executed.
FCFS Example
| Process | Start Time | Job Length |
|---|---|---|
| 1 | 0 | 5 |
| 2 | 1 | 10 |
| 3 | 2 | 1 |
FCFS Example:

FCFS Example: Task 1

FCFS Example: Task 2

FCFS Example: Task 3

FCFS Summary
Average Waiting Time:
- \[\frac{(0 + 4+ 13)}{3} = 5.66\]
Average Turnaround Time:
- \[\frac{(5+14+14)}{3} = 11.0\]
First Come First Served:
- Advantages:
- Low scheduler overhead
- Excellent when the program only consists of short, tasks
- Disadvantages:
- Low Throughput ?
- How to deal with blocking tasks?
Shortest Job First
- Aims to improve scheduling by giving priority to short lived tasks
- Minimises average waiting time for completion.
- How do we predict how long a job will take?
- What happens if we have lots of short processes
- Can starve longer processes of resources.
SJF
| Process | Start Time | Job Length |
|---|---|---|
| 1 | 0 | 5 |
| 2 | 1 | 10 |
| 3 | 2 | 1 |
SJF Example:

SJF Example: Task 1

SJF Example: Task 3

SJF Example: Task 2

SJF Summary
Average Waiting Time:
- \(\frac{(0 + 3+ 5)}{3} = 2.66\)
Average Turnaround Time:
- \(\frac{(5+4+15)}{3} = 8.0\)
SJF Starving Longer Processes
- A Problem with SJF is it can starve longer running processes
- If many short processes come in, then they are given priority
- This can be a problem with repeating tasks. (Especially if added to a queue)
Task
- Using the folloiwng processes. Calculate Wait, and Tunraround time for both SJF and FCFS
| Process | Arrives At | Execute Time |
|---|---|---|
| A | 1 | 1 |
| B | 2 | 5 |
| C | 3 | 3 |
Preemptive Scheduling
- RTOS use a Pre-emtive scheduling approach
- Based on the Priory of Tasks
- Task with the highest priority is the next to be executed
- Schedule can also interrupt a tasks execution
Preemptive Scheduling
- Task with the highest priority is run first
- If there are tasks with equal priority the scheduler chooses which to run
Preemptive Scheduling
- Advantages:
- Tend to have increased responsiveness
- Task response time is limited
- Disadvantages:
- Overhead in task switching
- Much harder to deal with shared resources.
The Scheduling Quantum
- The Unit of time which the scheduler is based on
- Hardware generates a signal at a set frequency (a tick)
- A Quantum is based on a set number of ticks
Picking a Quantum Size:
- Very difficult
- Large Quantum may starve small processes depending on the Scheduling
- Small Quantum will cause overhead
- Choice may also depend on the aspects of the system
- Some mathematical black magic needs to happen here.
Round Robin Scheduling:
- Processes are added to a Queue (similar to FCFS)
- Execution is broken into “slots” (A Quantum)
- Each process runs for a specified length of time
- At each scheduling interval, the next process in the queue is picked
Round Robin Scheduling
- Each Process gets an equal turn at execution
| 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|
| P1 | P2 | P3 | P1 | P2 | P3 |
Roudn Robin Scheduling: Example
| Process | Start Time | Job Length |
|---|---|---|
| 1 | 0 | 5 |
| 2 | 1 | 10 |
| 3 | 2 | 1 |
Round Robin Scheduling

Round Robin Scheduling

Round Robin Scheduling

Round Robin Scheduling

Round Robin Scheduling

Round Robin Scheduling
- Advantages:
- Starvation Free, All process get an equal opportunity to run
- Decent Throughput.
- Disadvantages:
- Higher overhead, due to context switching
- Higher overall Turnaround and Waiting time.
Round Robin with Priority Scheduling.
- Default Scheduler used in MBED / CMSIS RTOS
- As Round Robin. However higher priority tasks are favoured.
- It is also possible for a high priority task to Interrupt the current process.
Round Robin and the Quanum Size:
- The Quantum size can have an effect on the scheduling efficency.
- Lets see what happens in our example if we use a quantim size of 2
| Process | Start Time | Job Length |
|---|---|---|
| 1 | 0 | 5 |
| 2 | 1 | 10 |
| 3 | 2 | 1 |
Round Robin and the Quantum Size:
TODO: Add Photo
Round Robin Tasks
- Calculate Turnaround and Waiting times for the following processes
- Using a Quantum of 1
- Using a Quantum of 2
| Process | Arrives At | Execute Time |
|---|---|---|
| A | 1 | 1 |
| B | 2 | 5 |
| C | 3 | 3 |
Scheduling Priority
Priority in Scheduling
- Static: Priority of task is Set at compile time
- Advantage: Predictability
- Disadvantage: May suffer propriety inversion
- Dynamic: Each task can change its priority
- Advantage: Can help avoid Priority Inversion
Priority Inversion
- A Low Priority task blocks an important one
- Usually based around resource sharing
- Low priority task Locks the resource
- High priority needs access to the resource but cannot due to the Lock.
- Difficult to detect and debug.
Priority Inversion
- Three Tasks
- Task One: High Priority
- Task Two: Medium Priority
- Task Three: Low Priority
- Lets assume that there is also a shared resource on the system.
- For Thread Safety, this resource can be “Locked” buy the thread using it.
Priority Inversion
- Thread One, Starts and Gains Control of the Shared Resorce.
- Thread Two, Starts: Prempting Thread one to become the running thread
- Thread Three: Starts, Prempts then is Blocked when it trys to access
Shard Resource.
- Threfore Thread Three put in Waiting State
- Thread Two is the next Available task, so runs to completion
- Thread One, then runs untill the resource is unlocked
- At this point Thread Three can Prempt and finish.
Priority Inversion

Priority Inversion Solution
- Temporarily raise priority of task 3 to that of task one
- This allows the task to complete, and release the lock on the resource.
Setting Thread priority
Setting Thread Priority
- Lets Examine Thread Priority with an Example
Thread Priority Code
int main() {
// put your setup code here, to run once:
threadOne.start(led1Thread);
threadTwo.start(led2Thread);
threadThree.start(led3Thread);
wait_ms(osWaitForever);
}Running with default priority
- Everything Behaves as expected.
- All tasks are given Equal opportunity to run
How does this fit with our Round Robin?
SPARKBOARD!
Modifying the Priority of the Threads
- Set our first task to a Different Priority
- Visually this makes no difference.
- What about the Print Statements
What about the Scheduler Now
SPARKBOARD!
What about Blocking Tasks?
- What happens if one of our threads runs a high intensity task?
- Sheduler “Tick” is ~1ms
void blockingThread(){
while(1){
led1 = !led1;
for (int x=0; x<10000; x++){
//Delay of Approx One Second
wait(0.0001);
}
}
}Changing the Prioirty
- Standard Prioirity: Runs as Before
- Low Prioirty: Runs as Before
- High Prioirty: No other Threads get a chance to run
Changing the priority
threadOne.set_priority(osPriorityLow);And the Scheduler Now
SPARKBOARD
Bonus Example:
- There is a second thread priority example on Github.
- Try running the code and see what effect priority has here.
Summary
Summary
- This session we discussed scheduling algorithms
- Preemptive Round Robin is used
- Also had a look a threading priority
- Next we will look at issues with sharing data in a multi threaded environment.